pde.h File Reference
Class PDE: the differential equation object. More...
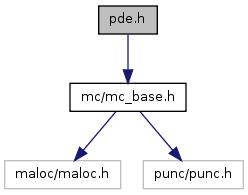
#include <mc/mc_base.h>
Include dependency graph for pde.h:
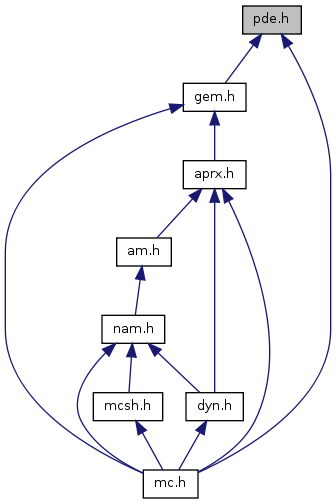
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | sPDE |
| Class PDE: Definition. More... | |
Typedefs | |
| typedef struct sPDE | PDE |
| Declaration of the PDE class as the PDE structure. | |
Functions | |
| void | PDE_setDim (PDE *thee, int d) |
| Set the extrinsic spatial dimension. | |
| void | PDE_setDimII (PDE *thee, int d) |
| Set the extrinsic spatial dimension. | |
| int | PDE_dim (PDE *thee) |
| Return the extrinsic spatial dimension. | |
| int | PDE_dimII (PDE *thee) |
| Return the extrinsic spatial dimension. | |
| int | PDE_vec (PDE *thee) |
| Return the PDE product space dimension. | |
| PDE * | PDE_ctor_default (void) |
| Construct a fake differential equation object in case there is not one provided. | |
| void | PDE_dtor_default (PDE **thee) |
| Destroy a fake differential equation object. | |
| int | PDE_sym (PDE *thee, int i, int j) |
| Return the bilinear form minor symmetry (i,j). | |
Detailed Description
Class PDE: the differential equation object.
- Note:
* The differential operator information is provided by * specifying the following: * * vec Product dim (unknowns per spatial point) * sym[MAXV][MAXV]; Symmetry/nonsymmetry of bilinear form * * initAssemble Once-per-assembly initialization * initElement Once-per-element initialization * initFace Once-per-face initialization * initPoint Once-per-point (e.g. quadrature pt) initialization * * Fu The nonlinear strong form defining the PDE * Ju The nonlinear energy (PDE is the Euler condition) * Fu_v The nonlinear weak form defining the PDE * DFu_wv The bilinear linearization weak form * delta The delta function source term (if present) * u_D The dirichlet boundary condition function * u_T Optional analytical solution function (for testing) * * bisectEdge The rule used to spit edges of simplices * mapBoundary The rule used to recover boundary surfaces exactly * markSimplex The rule used to mark simplices for refinement * oneChart Coordinate transformations * * simplexBasisInit Trial and test space bases initialization * simplexBasisForm Trial and test space bases formation * * The following two additional parameters are determined by the * input manifold, and are then set appropriately to be available * to the user's PDE definition routines above: * * dim Manifold intrinsic dim (determined by mesh input) * dimII Manifold imbedding dim (determined by mesh input) * * Notes on the forms: Fu_v/DFu_wv * * At the single given point x, we must evaluate the functionals * * Fu_v = F(u)(v) = F (x, u(x),grad u(x), v(x),grad v(x)) * * DFu_wv = DF(u)(w,v) = DF(x, u(x),grad u(x), v(x),grad v(x), * w(x),grad w(x)) * * The functional F(u)(v):HxH-->R is assumed to be linear in * the argument v, but possibly nonlinear in the argument u. * * The functional DF(u)(w,v):HxHxH-->R is assumed to be linear in * the arguments v and w, but possibly nonlinear in the argument u. * * Here, H is some Banach space of functions, such as the * Sobolev space W^{1,p}(\Omega), 1<=p<\infty, or some product * space based on these spaces. * * The forms Fu_v/DFu_wv and their use in Newton iterations: * * The functional F(u)(v) is a weak formulation of some nonlinear * partial differential equation. This functional represents a * nonlinear operator in an equation of the form: * * (P1) Find u in H such that F(u)(v)=0 for all v in H. * * As a function of its first argument only, the functional F(u)(v) * can be viewed as a mapping from the space H into the space of * linear functionals on H, or F(u)(v):H->L(H,R). Similarly, the * Frechet derivative of F(u)(v) with respect to u represents a * mapping DF(u)(w,v):H->L(HxH,R), which is a mapping from H into * the space of bilinear forms on H. At a point z in H, such a * bilinear form will be denoted: * * DF(z)(u,v). * * A Newton iteration for solving (P1) takes the form: * * (0) Given some initial guess of u in H. * (For linear problems, we will always start with u=0.) * (1) Find w in H such that DF(u)(w,v)=-F(u)(v), for all v in H. * (2) Update u: u = u + w * (3) If (F(u)(v)>TOL) for some v in H, goto (1) * (4) Quit * * If this is a linear problem, in that F(u)(v) is only affine in the * argument u rather than truly nonlinear, then the operator has * the general form: * * F(u)(v) = A(u,v) - (f,v), * * where A(u,v) is bilinear. Therefore, problem (P1) has the form: * * (P2) Find u in H such that A(u,v)=(f,v) for all v in H. * * The Frechet derivative of F(u)(v) with respect to u at a point z * is simply the bilinear form (independent of z) * * DF(z)(u,v) = A(u,v). * * Now, since we will require u=0 to start a Newton iteration for a * linear problem, this will produce the linear source term as * required to solve the linear problem: * * (Aw,v) = DF(0)(w,v) = -F(0)(v) = (f,v) * * So, Step (1) in our Newton iteration will be exactly the * solution of the linear problem (P2), which is the proper * linearization of a linear (affine) problem. Step (2) of the * Newton iteration them forms u as u=0+w, and Step (3) then sees * F(u)(v)=A(w,v)-(f,v)=0, which leads to completion in Step (4). * * Sub-form implementation of Fu_v/DFu_wv and computational details: * * For the sake of efficiency, these forms may be implemented in * terms of sub-forms on orthogonal spaces. For systems of partial * differential equations, the functions u,v,w above have the form: * * u=(u_1, u_2, ... , u_m), * * so that u then lies in the product space H=[H_1xH_2x...xH_m], * with each component function u_i in the space H_i. * * While the argument appearing nonlinearly in each form (namely u) * may have all components u_i nonzero, it is assumed that the other * two arguments which appear linearly always have only ONE component * (v_i != 0) for a given i; thus, * * v=(0, 0, ... , 0, v_i, 0, ... ,0), for some i, * w=(0, 0, ... , 0, w_j, 0, ... ,0), for some j. * * There may be (quite) significant reduction in computational costs * if this is known apriori. The arguments v and w will ALWAYS have * this form. Due to their linear appearance in the forms and the * orthogonality of spaces H_i and H_j for (i!=j) in the setting of * a product of spaces, the above forms can be viewed as: * * F(u)(v) = F_1(u)(v_1) + ... + F_m(u)(v_m). * * DF(u)(w,v) = DF_11(u)(w_1,v_1) + ... + DF_1m(u)(w_1,v_m) * + DF_21(u)(w_2,v_1) + ... + DF_2m(u)(w_2,v_m) * . * . * . * + DF_m1(u)(w_m,v_1) + ... + DF_mm(u)(w_m,v_m) * * Therefore, it may be more efficient to represent the forms * F(u)(v) and DF(u)(w,v) as additive collections of the sub-forms: * * F_i(u)(v_i), i=1,...,m * * DF_ij(u)(w_j,v_i), i=1,...,m, j=1,...,m * * In fact, in a finite element discretization, somewhere we will * have to split the forms into the above sub-forms. We can attempt * to exploit this known structure and save on some computation by * designing the F(u)(v) and DF(u)(w,v) routines to return ARRAYS * of values, GAMMA[m][1] and THETA[m][m], containing the values of * the above sub-forms at the given input point. If it is difficult * to split the forms by hand, one can of course simply use the full * forms F(u)(v) and DF(u)(w,v) to fill the arrays GAMMA and THETA; * you just need to plug in the basis functions having the form: * * v=(0, 0, ... , 0, v_i, 0, ... ,0), * w=(0, 0, ... , 0, w_j, 0, ... ,0), * * taking i=1,...,m, and also j=1,...,m. * *
- Version:
- Id
- pde.h,v 1.22 2010/03/24 23:41:58 fetk Exp
- Attention:
* * MC = < Manifold Code > * Copyright (C) 1994--2008 Michael Holst * * This library is free software; you can redistribute it and/or * modify it under the terms of the GNU Lesser General Public * License as published by the Free Software Foundation; either * version 2.1 of the License, or (at your option) any later version. * * This library is distributed in the hope that it will be useful, * but WITHOUT ANY WARRANTY; without even the implied warranty of * MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the GNU * Lesser General Public License for more details. * * You should have received a copy of the GNU Lesser General Public * License along with this library; if not, write to the Free Software * Foundation, Inc., 59 Temple Place, Suite 330, Boston, MA 02111-1307 USA * *